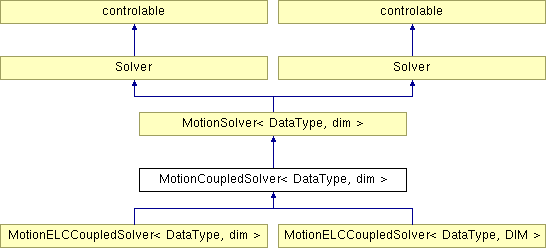
MotionCoupledSolver< DataType, dim > Class Template Reference
#include <MotionCoupledSolver.h>
Public Member Functions | |
| MotionCoupledSolver () | |
| virtual void | SendBoundaryData ()=0 |
| virtual void | PostReceiveBoundaryData ()=0 |
| virtual void | WaitReceiveBoundaryData ()=0 |
| virtual void | sendBoundaryReceivePressure ()=0 |
| virtual void | register_at (ControlDevice &Ctrl, const std::string &prefix) |
| virtual void | register_at (ControlDevice &Ctrl) |
| virtual void | Initialize (double &t, double &dt) |
| virtual void | Advance (double &t, double &dt) |
| virtual void | Restart (double &t, double &dt) |
| int | NumNodes () |
| int | NumElements () |
| DataType * | Pressures () |
| const int * | NodeIDs () const |
| const int * | Connections () const |
| const DataType * | Coordinates () const |
| const DataType * | Velocities () const |
Protected Attributes | |
| int | CouplingStrategy |
| DataType | SAL |
template<class DataType, int dim>
class MotionCoupledSolver< DataType, dim >
Constructor & Destructor Documentation
| MotionCoupledSolver< DataType, dim >::MotionCoupledSolver | ( | ) | [inline] |
Member Function Documentation
| virtual void MotionCoupledSolver< DataType, dim >::Advance | ( | double & | t, | |
| double & | dt | |||
| ) | [inline, virtual] |
Reimplemented from MotionSolver< DataType, dim >.
Reimplemented in SolidSolverSpecific.
| const int* MotionCoupledSolver< DataType, dim >::Connections | ( | ) | const [inline] |
References MotionSolver< DataType, dim >::pressures.
| const DataType* MotionCoupledSolver< DataType, dim >::Coordinates | ( | ) | const [inline] |
References MotionSolver< DataType, dim >::nodeids.
| virtual void MotionCoupledSolver< DataType, dim >::Initialize | ( | double & | t, | |
| double & | dt | |||
| ) | [inline, virtual] |
Reimplemented from MotionSolver< DataType, dim >.
Reimplemented in SolidSolverSpecific.
References MotionCoupledSolver< DataType, dim >::register_at().
| const int* MotionCoupledSolver< DataType, dim >::NodeIDs | ( | ) | const [inline] |
References MotionSolver< DataType, dim >::num_connections.
| int MotionCoupledSolver< DataType, dim >::NumElements | ( | ) | [inline] |
| int MotionCoupledSolver< DataType, dim >::NumNodes | ( | ) | [inline] |
| virtual void MotionCoupledSolver< DataType, dim >::PostReceiveBoundaryData | ( | ) | [pure virtual] |
Implemented in MotionELCCoupledSolver< DataType, dim >, and MotionELCCoupledSolver< DataType, DIM >.
| DataType* MotionCoupledSolver< DataType, dim >::Pressures | ( | ) | [inline] |
References MotionSolver< DataType, dim >::num_vertices.
| virtual void MotionCoupledSolver< DataType, dim >::register_at | ( | ControlDevice & | Ctrl | ) | [inline, virtual] |
Reimplemented from MotionSolver< DataType, dim >.
Reimplemented in MotionSpecific, MotionSpecific, MotionSpecific, MotionSpecific, and MotionSpecific.
| virtual void MotionCoupledSolver< DataType, dim >::register_at | ( | ControlDevice & | Ctrl, | |
| const std::string & | prefix | |||
| ) | [inline, virtual] |
Controls for Assemblies & Denavit-Hartenberg Kinematic Chains and simple motion; complex motion is described in SolidProblem.h or in mechanism headers in a case src/
Assemblies
Denavit-Hartenberg Kinematic Chains
Reimplemented from MotionSolver< DataType, dim >.
Reimplemented in MotionSpecific, MotionSpecific, MotionSpecific, MotionSpecific, and MotionSpecific.
References MotionSolver< DataType, dim >::register_at().
Referenced by MotionCoupledSolver< DataType, dim >::Initialize().
| virtual void MotionCoupledSolver< DataType, dim >::Restart | ( | double & | t, | |
| double & | dt | |||
| ) | [inline, virtual] |
Reimplemented from MotionSolver< DataType, dim >.
Reimplemented in MotionSpecific, MotionSpecific, MotionSpecific, MotionSpecific, and MotionSpecific.
| virtual void MotionCoupledSolver< DataType, dim >::SendBoundaryData | ( | ) | [pure virtual] |
Implemented in MotionELCCoupledSolver< DataType, dim >, and MotionELCCoupledSolver< DataType, DIM >.
| virtual void MotionCoupledSolver< DataType, dim >::sendBoundaryReceivePressure | ( | ) | [pure virtual] |
Implemented in MotionELCCoupledSolver< DataType, dim >, and MotionELCCoupledSolver< DataType, DIM >.
| const DataType* MotionCoupledSolver< DataType, dim >::Velocities | ( | ) | const [inline] |
References MotionSolver< DataType, dim >::connections.
| virtual void MotionCoupledSolver< DataType, dim >::WaitReceiveBoundaryData | ( | ) | [pure virtual] |
Implemented in MotionELCCoupledSolver< DataType, dim >, and MotionELCCoupledSolver< DataType, DIM >.
Member Data Documentation
int MotionCoupledSolver< DataType, dim >::CouplingStrategy [protected] |
DataType MotionCoupledSolver< DataType, dim >::SAL [protected] |
The documentation for this class was generated from the following file:
- coupling/MotionCoupledSolver.h
Generated on Thu Jun 30 02:18:58 2016 for Motion - rigid body dynamics solver by
 1.6.3
1.6.3